 Ken York put together this 2
legged walker robot using the mechanical pattern given in
Karl Williams's book Build Your Own Humanoid Robot. This is
a great book that covers the BiPed and several other projects
as well. A robot arm using servo motors and driven with a
Windows GUI Visual Basic based application for control.
Ken York put together this 2
legged walker robot using the mechanical pattern given in
Karl Williams's book Build Your Own Humanoid Robot. This is
a great book that covers the BiPed and several other projects
as well. A robot arm using servo motors and driven with a
Windows GUI Visual Basic based application for control.
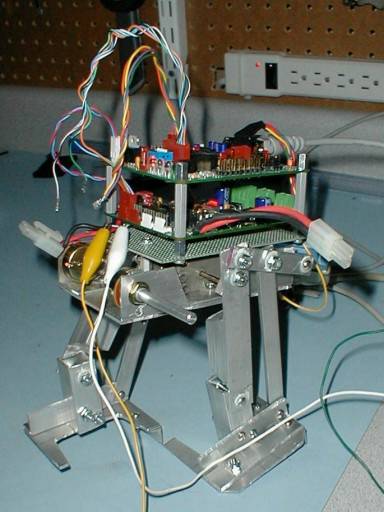
Ken used the mechanicals from the book but
opted for a DARC Board and DARC DMC (DC Motor Controller)
Board for the electronics rather than the PIC based solution
listed in the book.
This photo shows it in infancy stage with
power supplied externally and control being done via serial
port to a PC. Several wires dangle forlornly without purpose.
But it is ultra cool nonetheless. Ken did almost all of this
work with a hack saw and a hand drill before I offered up
my band saw and drill press. It works anyway.
The DARC Boards are the top two layers. The
3rd board down is just a mounting platform for the other boards.
The Tamiya 2 motor gear box (see photo below) is under the
circuit boards. You can see the output shaft of one motor
where it attaches to the leg assembly.
The long shaft sticking out in front is a
potentiometer and provides the feedback so that the DARC Board
know to what position a leg has been moved by the motor. |
 This shot shows a close up of the Tamiya motor/gear
box that provides power for the legs' movement. You can see
the black set screw protruding from the linkage on the right
leg. The potentiometer can also be seen in more detail here.
Ken hasn't wired it up to the DARC Board yet so the terminals
are still visible.
This shot shows a close up of the Tamiya motor/gear
box that provides power for the legs' movement. You can see
the black set screw protruding from the linkage on the right
leg. The potentiometer can also be seen in more detail here.
Ken hasn't wired it up to the DARC Board yet so the terminals
are still visible.
